Blog #4 - Solar Powered Remote Controlled Lawn Mower
Question 1:
Over the work period of November 13-23 our team has worked on finalizing our overall design and component specifications, backing our part selections with relevant calculations and creating a CAD assembly to illustrate our general design plan. After calculating required specifications, we then conducted research to find parts that fit our needs and where we can buy them for the best prices. We then constructed our design review presentation slides to include our problem description, CAD design illustrations, and our parts list/budget. After this, we gave our design review presentation. Since then, we have reviewed our components list and finalized our selections. We have also begun work on our design review report, working on gathering information for the main sections of the report.
Question 2:
Our final design concept consists of 4 wheels attached to a 18x24 inch ¼ inch thick aluminum plate. Two of these wheels will be 6 inch diameter off road tires, and each will have their own 12V brushed 165 RPM planetary gear motors with 49 kg-cm of torque. The other two wheels will simply just be additional points of contact, and will be 4 inch diameter off-road free spinning caster wheels. The mower will be driven by the two gear motors, and will also be steered by controlling these two motors independently (similar to a tank or electric wheelchair). These motors will be controlled with their own electronic speed controllers, which will be powered by a 16 amp hour lithium iron phosphate battery on board the mower. We will use a hobby grade RC receiver on the mower, which will be controlled with its corresponding RC transmitter. The cutting mechanism will be the electric motor and cutting head of an existing electric weed whacker, featuring a plastic blade. This will ensure we will achieve motor speeds fast enough to actually cut grass, as the weed whacker cutting setup was purpose built to accomplish this. A 50 watt solar panel and 10 amp solar charge controller will charge the battery, and will be on a removable cover that will fit on top of the whole mower.
In order to calculate the needed torque and RPM outputs of the two drive motors we used the free body diagram and equations shown below in Figure 1. After specifying our speed goal of 3 mph (~1.34 m/s), 6 inch diameter wheels, a 20 degree maximum incline, an approximate total mass of 16 lbs, accounting for an efficiency factor of 90%, and an acceleration of .75 m/s^2 (this acceleration is somewhat arbitrary, since this is not a figure we will be quantifying or focused on) we calculated that we need a minimum of 12.86 kg-cm of torque and approximately 168 rpm on each wheel.


Figure 1: FBD and derived equations for drive wheels and motors
Once this torque was obtained, the following relationships were then used to find we need ~3.7 Amp-hours of battery capacity for each of the two drive motors: P=τω→ I=PV=τωV → C=I*t = τωtV
The weed whacker we selected is rated to run for 30 minutes on a 2 Amp-hour battery, so we assume we will need 5 Amp-hours total to run the cutting motor. For the two drive motors, the cutting motor, and the small power consumption of the RC receiver and ESC’s we estimate the system will consume about 13 Amp-hours of battery capacity for our specified goal of a 60 minute run time. We selected a 16 Amp-hour battery and 165 RPM gear motors with output torques of 15 kg-cm based on our calculations.
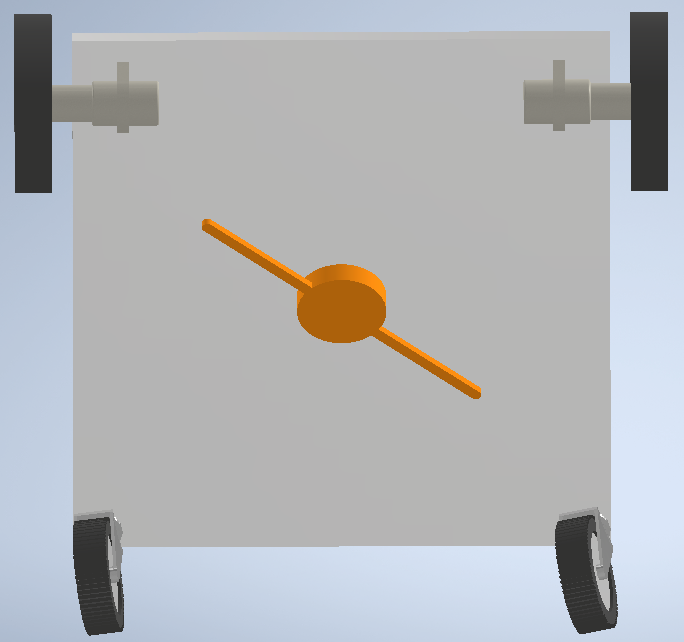

Figure 2: Fully assembled CAD assembly
Figure 3: Underneath view of CAD assembly

Figure 4: Parts list and budget
Figure 2 shows the full CAD assembly with the solar panel cover fastened on top. The panel itself is rated to output 50 Watts, and will be fixed to a thin sheet of acrylic with 3D printed legs on each of the 4 corners which will mount to the main chassis. Figure 3 is a view of the under-carriage of the full design, showing the two wheels with their own planetary gear motors mounted to the 6 inch diameter tires and the two bottom free-spinning caster wheels. In the middle of Figure 3 is the plastic cutting blade from the weed whacker. Lastly, Figure 4 shows our selected parts list with their real-world price data. If all goes to plan, we will achieve our budget goal of $500.
An issue we might run into is building the RC system for our design, since it isn’t as straightforward as run-of-the-mill RC cars for example. By combining the steering with the 2 drive motors we opened up a new door of complexity. To overcome this, we may seek out an external RC expert/mentor and will spend extra time researching and experimenting with miniature systems.
Question 4:
Over the few weeks of the winter break, we will be purchasing and acquiring as many parts that we can so when it comes time to assembling and testing the prototype in the spring semester, we will be ready for it. Most of our parts are from Amazon with the rest being from RC related websites. The parts from amazon after ordering, should arrive within 2-6 days and the parts from the other websites should arrive within 2 weeks. We plan to start ordering parts as soon as the fall semester ends.



Comments
Post a Comment