Blog #4 - Solar Powered Remote Controlled Lawn Mower
Team 19 has completed the assembly of the solar powered RC lawn mower prototype (Figure 1). The prototype is fully functional, with all subsystems working properly. The design is fully self contained, requiring no charging or user input besides using the RC remote to control the mower.

Figure 1: Overall view of Team 19’s solar powered remote controlled lawn mower
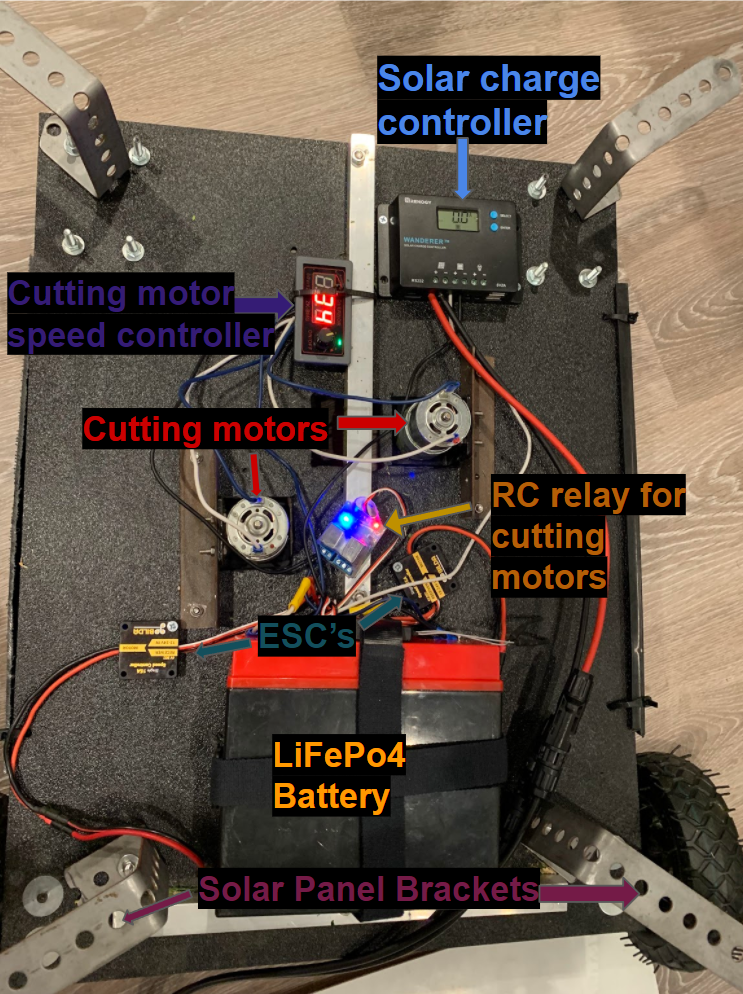
Figure 2: Component break down of final design

Table 1: Speed test data
Testing the range of our device yielded an operable distance of 245 feet, which is more than sufficient for our intended applications (yard size less than .2 acres). Battery consumption testing has given us an approximate run time of 3.3 hours, and our specified goal was one hour (Table 2).

Table 2: Capacity tests to approximate runtime

Table 3: 100 sq. ft. timed cutting tests
The most recent test the group has performed is the cutting height tests, which yields an average final cut height of about 2.4 inches. This is a bit under our goal of 2.5 inches, but the team considers this specification successful since the difference is very minor (.1 inches).
Overall the team is very satisfied with our final design solution, as we feel it meets the goals we have tested quite well and is expected to perform just as well in our remaining validation tests. The addition of the second cutting motor and PWM controller doubled the cutting width to 10 inches and made the device much quieter, and the aluminum frame supports seem to have greatly added to the longevity of our mower. The device has proven to be tricky to learn how to control due to the dual-motor tank-like steering, but once the user is acquainted the device is very easy to maneuver and use. As mentioned earlier the design doesn’t meet our goal of 1 hour to mow .2 acres, but this could be fixed by switching to a large metal blade and/or using higher RPM drive motors if we were to redesign to prioritize this specification. Team 19 feels our final design so far sufficiently meets our main goals sufficiently in the scope of a senior Mechanical Engineering Capstone project.
All that is left for the project is to continue our validation testing: perform more trials where needed, noise level testing, traversable slope testing. Since the prototype is fully assembled and stress-tested quite well, we expect testing to go smoothly with minimal issues. Depending on how some of the testing goes, the methodology of some validation testing may be altered to prevent excessive wear on parts and produce more realistic data.


Comments
Post a Comment